爬绳机器人是一种“仿生机器人”,“仿生机器人”是指模仿生物、从事生物特点工作的机器人,爬绳机器人就是利用机械结构模仿生物的爬绳动作。
(具体实验步骤详见以上视频)
实验步骤:
1. 认识零件;(自备螺丝刀和一对5号AA电池)。
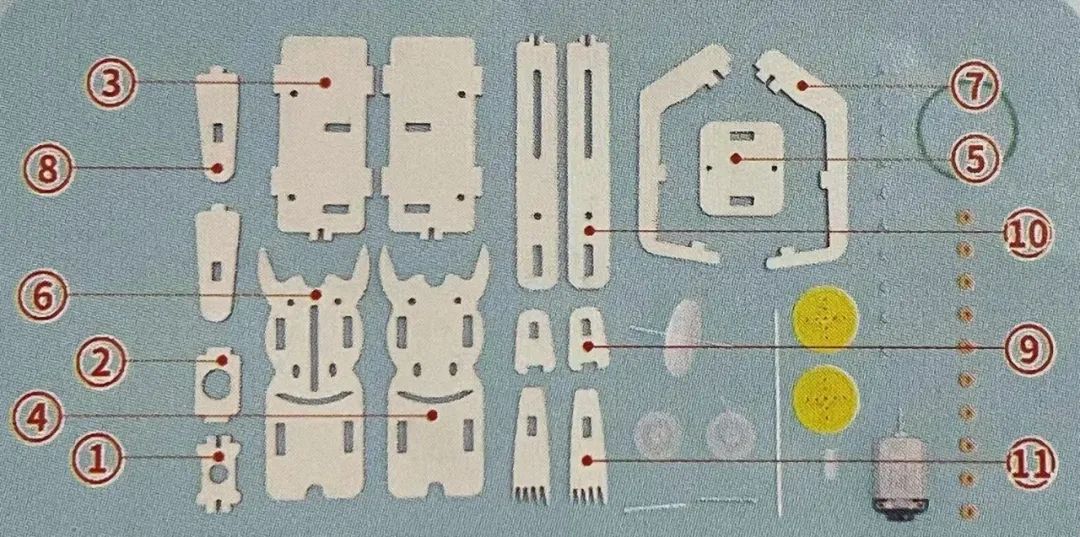
2.参照视频,首先把①、②号电机固定板安装在电机上,然后把蜗杆齿安装在电机轴上。安装方法:可以把蜗杆齿竖起来放在垫板上,把电机轴对准蜗杆齿的圆孔,然后向下按压。3.把电池盒的导线连接在电机铜片上。红色导线连接在电机左边的铜片上,黑色导线连接在电机右边的铜片上。
6.用4mm粗纹螺丝把另一块③号板安装好,调节齿轮和蜗杆齿吻合好,在齿轮轴两端用橙色固定圈固定好,固定圈距离③号板留1mm间隙,不留间隙会导致齿轮转动阻力增大。
7.把④号板安装在③号板上,注意④号板上孔的朝向。9.参照视频孔位,首先把7cm铁轴穿过两块③号板的圆孔,然后在铁轴的两端套上橙色固定圈和皮带轮。10.把⑥号板安装在③号板上,把线隐藏在⑥号板下面。
11.参照视频,用4mm粗纹螺丝把电池盒安装在⑤号板上。12.把⑥号板安装在③号板上,把线隐藏在⑥号板下面。
13.参照视频,首先把⑦、⑧、⑨号板组装成手臂,然后把⑩号板、⑪号板组装成下肢。14.参照视频,用4mm粗纹螺丝把手臂和下肢连接起来。15.把大头钉穿过黄色皮带轮的大圆孔安装在⑩号板上,另一端用两个橙色固定圈固定好,固定圈离⑩号板留3mm左右的间隙,避免黄色皮带轮在转动过程中与4mm粗纹螺丝产生摩擦。16.参照视频,把黄色皮带轮中间的圆孔安装在齿轮轴上,⑩号板的活动槽穿在7cm铁轴上,用橙色固定圈固定好,固定圈离⑩号板留1mm间隙,不留间隙会导致转动阻力增大。注意⑪号板的朝向。17.另一边使用上一步同样的方法安装好。调节大头钉的朝向保持一上一下。18.爬绳机器人制作完成,在电池盒上安装好电池后,用橡皮筋固定住电池,避免电池脱落。把机器人挂在绳子上,闭合刀闸开关,机器人就能行动了。知识拓展:
机器人一般由执行机构、驱动装置、检测装置和控制系统及复杂机械等组成。在机器人当中,智能机器人是当今世界的主要研究对象。科学家们认为,智能机器人的研发方向是,给机器人装上“大脑芯片”,从而使其智能性更强,在认知学习、自动组织、对模糊信息的综合处理等方面将会前进一大步。“仿生机器人”因其对工作环境的适应性强而能很好的发挥其作用,比如天空、海洋、太空等环境。曾杰、朱钊辉、李献军、吕彦辉、余楚瑞、陈可心、高洁、陈俊邑、罗丹、鱼鱼、曾凡金、杨悠悠、姜俊安、王文、陈子墨、帆帆、王莉莉、李京晶、Sunny、黄铭瀚
(1)10月20日前转发本文至朋友圈,并附上“科学实验室,一起涨知识”;
(2)集齐18个赞;
(3)请按照姓名、电话、邮寄地址、截图的顺序发送至本公众号后台对话框(缺一不可,注意发送顺序方便工作人员统计);
(4)等待工作人员核实,我们将按顺序选前20名给予回复;
(5)免费邮寄本期科学实验材料包到家。
(6)注:科学实验室活动仅限常德地区参与。
快和爸爸妈妈一起,
开启科学探寻之旅吧!
